蔚小理已经用上的自动驾驶技术,小米2年后再用,晚不晚?

罗永浩宣布将从明天开始,退出所有社交平台,将再次埋头创业去了。作为被称为“行业冥灯”的罗永浩,在屡次跌倒后,都坚强的爬了起来,还能继续创业,这种精神绝对值得我们敬佩。当然,我们今天说的也是一位一直创业的企业家,而这是他今生的最后一次创业,他就是雷军,小米汽车是他自述的今生最后一次创业,而这也承载着无数人的期待。最近,小米汽车又有一系列引人关注的专利被公布出来,结合这些专利,我们可以来一起看看,小米汽车进展到哪一步了?

从专利能看出来,小米汽车的动力形式不止纯电?
这一次的专利曝光依然是围绕着小米自研的自动驾驶系统而展开的,首先是关于“自动超车方法、装置、车辆、存储介质及芯片”。如今,决策规划算法是自动驾驶技术框架中的核心技术,其中超车变道算法是决策规划算法的重要组成部分,通过超车变道算法控制车辆完成自动超车。相关技术中,超车变道算法主要根据前车速度、前车距离等行车数据,并使用变道加速收益模型来判断是否执行变道超车。但该判断方式未考虑车辆类型对变道时机和变道行为的影响,导致同样的超车变道逻辑难以适用所有类型的车辆,最终导致超车时用户体验不佳,甚至无法实现变道超车。
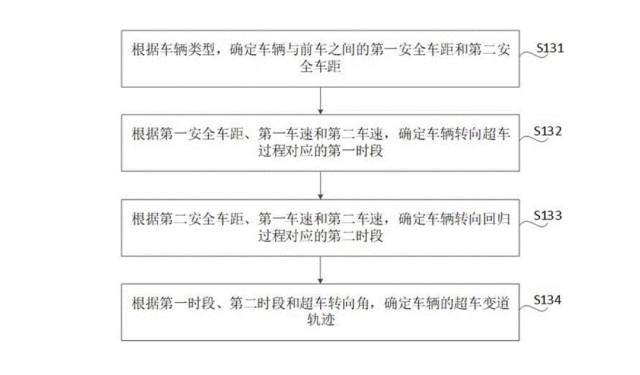
响应于车辆与前车之间的车距小于预设距离阈值,确定前车的车辆类型和第一车速,根据车辆类型、第一车速、车距和车辆的第二车速,确定车辆的超车决策结果,在超车决策结果小于预设决策阈值的情况下,根据车辆类型、第一车速、车距和第二车速,确定车辆的超车变道轨迹,基于超车变道轨迹,控制车辆执行超车。从而根据车辆类型和相关行车数据,确定车辆当前是否执行自动超车,在通过算法确定车辆需要进行超车时,通过车辆类型和相关行车数据,生成车辆对应的超车变道轨迹,使车辆根据该超车变道轨迹进行自动超车。将车辆类型作为算法的必要考虑因素,使车辆能够基于当前实际情况,准确的执行超车变道过程,给乘客带来更好的自动驾驶体验。
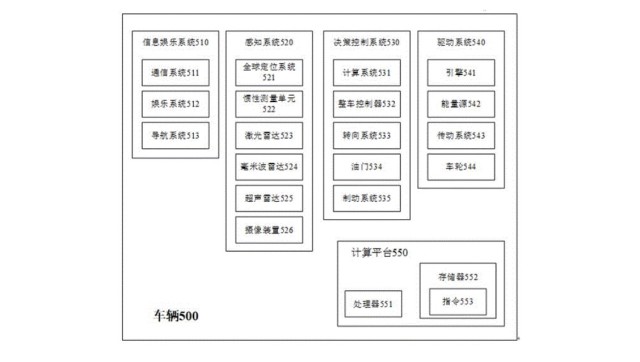
在专利中,再一次提及了车辆的自动驾驶感知硬件,是通过激光雷达、毫米波雷达、摄像头和惯性测量单元等,这些硬件在算法的统筹下,让车辆在预设的阈值内完成超车动作,我们还注意到了专利中所说的“车辆500”由内燃机将燃料转化为机械能,也就是说小米汽车可能会有燃油、增程式和纯电等动力形式,但最后专利中提到:车辆500可以为各种类型的行驶工具,例如,轿车、卡车、摩托车、公共汽车、船、飞机、直升飞机、娱乐车、火车等等,本公开实施例不做特别的限定。当然,小米汽车也确实不一定就完全是纯电车,多元化的产品策略对于增强品牌的竞争力有着很强作用。
其实像小米自动超车这种类型的专利,百度阿波罗、广汽、东风汽车等公司也都有类似的专利,但对于阈值设定的不同,方案的细微不同也能让它们相互有差异。目前,像特斯拉最新的FSD已经在海外开通了自动超车的功能,国内新势力蔚小理也都有类似的功能正在落地,自动超车对于L3级自动驾驶来说,可能用处还不大,目前已上路的L3还是以跟车为主,比如奔驰。但对于今后L4-L5来说,自动超车功能相当重要。

百度“养虎成患”?小米汽车将配百度高精地图
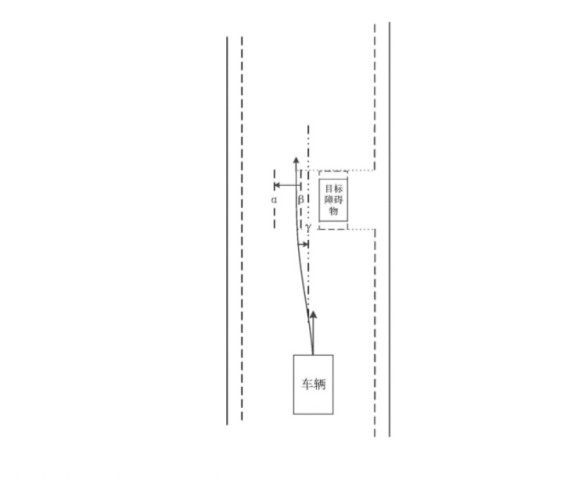
小米的另一项发布的专利,是关于解决目前自动驾驶领域稳定安全的一个重难点问题――躲避障碍物,专利叫做“路径规划方法、装置、存储介质及车辆”。
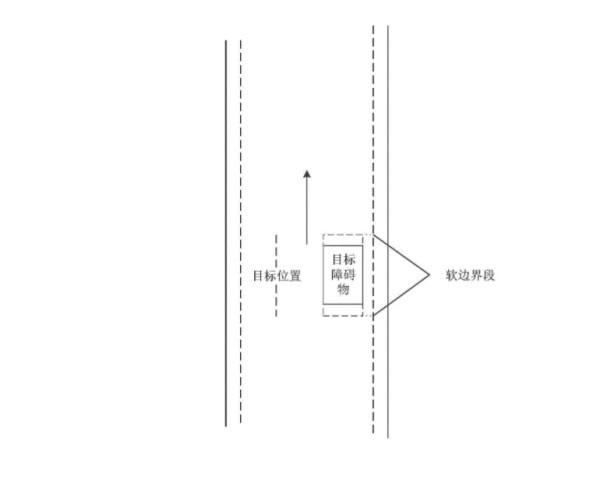
自动驾驶系统的路由模块基于车辆位置、目的地位置、以及高精地图规划车辆需要经过的路段。运动规划模块根据路由模块输出的信息以及感知模块等提供的信息生成安全舒适的行驶轨迹发送给车辆控制模块。车辆控制模块根据行驶轨迹控制车辆行驶。对于路段上的障碍物,尤其是高速运动的障碍物,出于安全考量,运动规划模块采取变道行驶或者减速刹车的策略来规划行驶路径以避免车辆与障碍物碰撞。然而这种避障方式导致车辆行驶的平稳性较差。也就是会出现突然的高速闪躲,让车内乘员始料未及,可能导致危险情况发生。
之前,我们在上一次的解析文章中提到,小米将采用高精地图,而这一次的专利中,小米直接表明了将采用百度的高精地图:自动驾驶车辆采用的路径规划方法是百度Apollo EM Motion Planner提供的方法。Apollo的功能架构包括高精地图模块(HD Map),用于提供高精度地图信息。定位模块和感知模块用于提供当前车辆周围动态环境。预测模块用于提供预测的未来环境信息。路由模块用于基于专用的路由地图,输出车辆在从出发点到目的地的过程中经过的所有路段。运动规划模块,用于接收所有信息生成安全舒适的轨迹发送给车辆控制模块。