蔚小理已经用上的自动驾驶技术,小米2年后再用,晚不晚?(2)

其中,运动规划模块对于路段上的障碍物,尤其是高速运动的动态障碍物,出于安全考量,运动规划模块会采取变道行驶或者减速刹车的策略来规划行驶路径以避免车辆与障碍物碰撞。然而,由于较大的换道动作、或者由于减速刹车带来的速度变化过快所导致的大幅度动作会导致车辆行驶很不平稳。例如,急刹车、急剧减速、猛然变道等所带来的车辆行驶不平稳现象。所以车辆会在探测到障碍物后,用复杂的函数运算确定一个物体的软边界,再通过车辆自身位置和后续探测数据,经过其他函数运算确定硬边界,从而提前规划躲避路径,让躲避障碍物变得更轻松,车内驾乘体验更好。
但我们看到的,这一次主要针对的是移动障碍物,没说是卡罗拉、轩逸和雷凌,不要过度联想......但现在的自动驾驶对于固定的静止障碍物的识别度并不够,上一次特斯拉撞飞机,蔚来、小鹏高速上撞故障车,都是静止物体的锅,所以也希望更多企业能够对于解决静止障碍物的躲避识别,做出更多研究和开发。

小米的绿波通行,会更顺畅?
小米的专利中,还有一点也是我们上一次文章中说中的,关于车路协同的技术。在自动驾驶技术中,城区无人驾驶是一个非常难解决的场景,一是由于城区高精度图制作成本高,建图的精度有限,即使构建起来的地图也只是包含道路相关元素信息,没有考虑道路的更多相关动态属性。二是城区交通复杂,车道线、红绿灯等规则多变且繁复,同时道路又存在遮挡、磨损等多样性情况。在这种情况下,了解道路元素更丰富的信息,会有利于无人驾驶城区场景的落地。其中,最重要的就是红绿灯的问题,虽然现阶段对红绿灯的识别检测问题已经被广泛研究,但是尚未有自动获取每个红绿灯的倒计时的方法,无法准确的估计城区路口每个红绿灯的倒计时状态,进而无法满足高精度的实时观测交通状态,阻碍城市交通网的建立,影响用户体验。
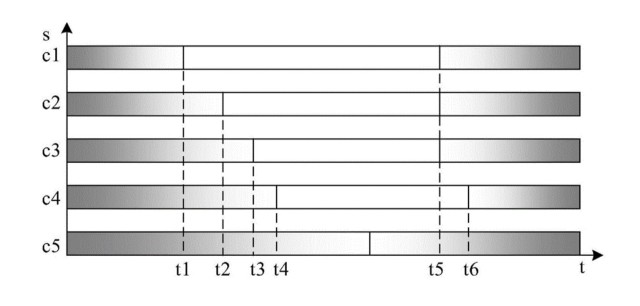
这项专利的实施,先要获取待计算的交通灯所对应路口的历史车辆数据,再根据历史车辆数据,确定至少一个目标车辆的车辆数据,然后基于至少一个目标车辆的车辆数据,确定每个目标车辆在路口的停止时刻和启动时刻,最后根据每个目标车辆在路口的停止时刻和启动时刻确定交通灯的红灯时长。与现有技术相比,通过检测路口车辆状况,自动获取倒计时长,为城市动态高精地图的每个红绿灯提供倒计时属性,进而规划出合理的速度和路线,提高自动驾驶技术的精度,提升交通效率和乘客的舒适性。这项技术对于落户在亦庄的小米来说,验证实现起来较为容易,因为亦庄有着目前国内几乎最完善的车路协同基础设施,每个红绿灯上都有车路协同的接发设备,百度的阿波罗已经在这里跑了很长时间了。
小米的一个个自动驾驶专利密集地被审批、上线,可以看出小米软件研发速度相当之快,这一次还有关于车道保持、多相机模组配合的专利,我们之后也会再进行解析。

2022年已经过半了,离雷布斯的新车量产满打满算也就还有两年时间,新势力们最近抢眼的表现或许会促使小米造车再度提速。这一次我们已经明确看到了,小米汽车将使用百度的高精地图技术,而百度的亲儿子集度,也和小米一样落户在了亦庄,两个实力更强大的新势力造车企业,会在北京亦庄的土地上展开角逐。